Подсистема исполнения сохраненных движений
Подсистема включает в себя интерактивные средства построения траекторий в угловой СК путем задания последовательности контрольных точек и задатчики системы управления движением, исполняющие эти траектории.
Эти возможности в основном необходимы для создания анимаций. Сначала робот "обучается" движению путем помещения в ключевые позы, а затем это движение проигрывается задатчиком по текстовому идентификатору.
Требования
-
Проигрывание траекторий заданных в угловой СК (на уровне
JointState) в разных вариантах:- траектория передается в виде сообщения,
- траектория хранится в некотором хранилище исполняется по сообщению с указанием ее идентификатора. Интеграция траекторий с сопутсвющими действиями (фразы, смена эмоций) осуществляет высший уровень.
-
Интеграция с MoveIt!: исполнение траекторий, сохранение их. В перспективе использование ее средств для проверки столкновений.
-
Интерактивные средства создания траекторий, путем указания контрольных точек в угловой СК и времени исполнения. Траектории могут снабжаться информацией о дополнительных действиях.
- Возможность работы только с моделью робота (траектория исполняется в
rviz, контрольные точки задаются средствами ROS). - Возможность работы с роботом (траектория исполняется роботом, контрольные точки задаются позой).
- Формирование базы данных с сохраненными траекториями для последующего исполнения задатчиками.
- Возможность работы только с моделью робота (траектория исполняется в
Архитектура подсистемы
Для управления движением используются действия actionlib.
Это наиболее полно соответствует конечному характеру траектории, позволяет контролировать и прерывать ее исполнение.
Базовый вариант системы включают:
-
Задатчик
AnimationJointTrajectory--- исполнение действияcontrol_msgs::FollowJointTrajectory. Он решает задачу интеграции с MoveIt!, может исполянть сохраненные траектории передаваемые, загружемые из хранилища на стороне клиента. Задатчик поддерживают сопряжение траекторий (за счет механизма фильтров дляJointState), отмену исполнения траектории, переключение на другую траекторию.Набор необходимых ресурсов определяется по списку сочленений при помощи плагина
RobotModelURDF. Полученная или загруженная траектория приближается сплайнами второго порядка.Совместное исполнение нескольких траекторий достигается загрузкой нескольких экземпляров задатчика.
-
Клиентский код на
pythonспособный по текстовому идентификатору загружать траекторию из хранилища и передавать ее на исполнение задатчику. Хранилище представляет собой список бинарных параметровrosparam. Имя параметра играет роль его текстового идентификатора. -
Компонент
joint_trajectory_editor, выполняющий роль GUI для создания траекторий. Его центральный элемент --- список контрольных точек. Он предоставляет пользователю следующие возможности: - Редактирование: добавление в список точки (виртуального или реального робота), назначение
time_from_startдля точек, редактирование заголовкаFollowJointTrajectory. - Сохранение траектории в хранилище.
-
Команды: послать траекторию на исполнение виртуальному или реальным роботом, отключить/включить приводы.
-
Подсистема MoveIt!, она способна формировать команды в форме действий
control_msgs::FollowJointTrajectory.
Ниже приведена структурная схема системы, используемой для интерактивного построения траекторий:
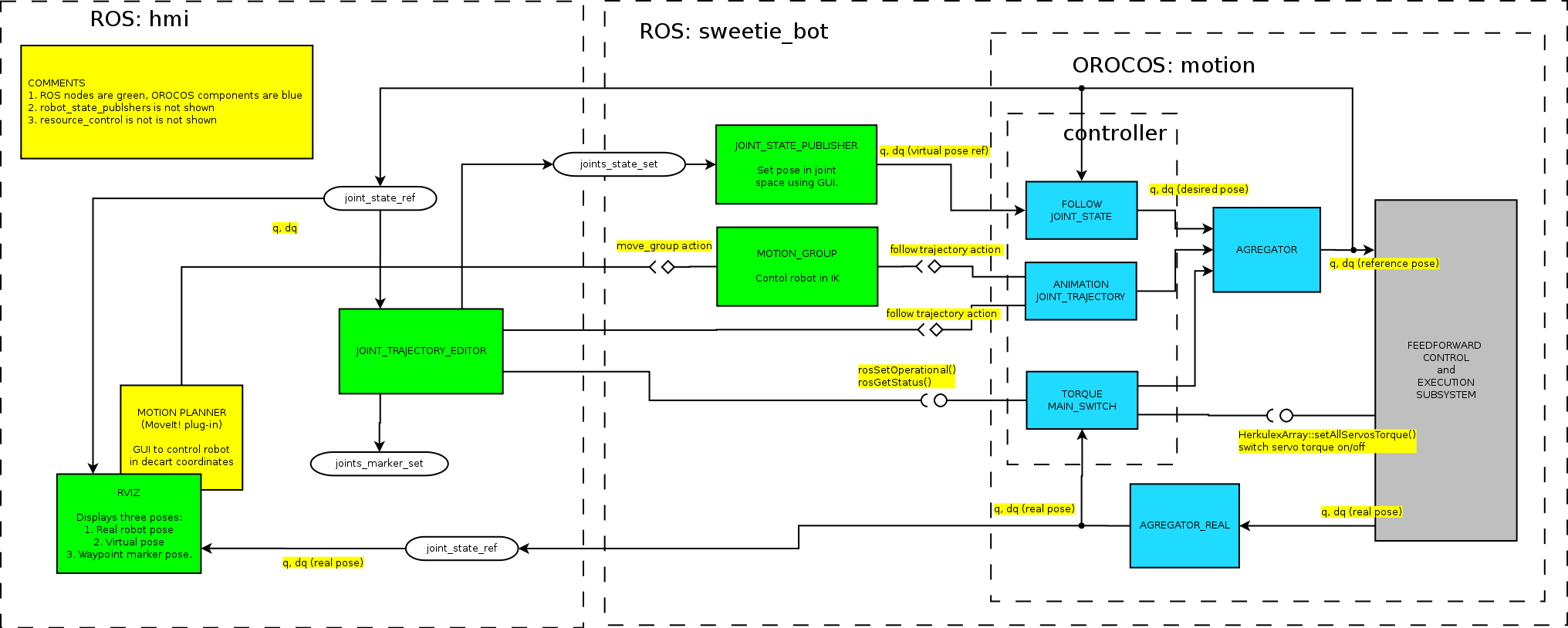
(Названия топиков сокращены, реальные названия в соответствие с правилами именования будут:
joint_states_ref: /sweetie_bot/motion/agregator_ref/out_joints_sorted,
joint_states: /sweetie_bot/motion/agregator_real/out_joints_sorted и
/sweetie_bot/motion/agrgator_real/out_joints).
Она включает с себя 2 подсистемы: робот (sweetie_bot), средства отображения и редактирования траектории (hmi).
Редактор траекторий joint_trajectory_editor может передавать траекторию на исполнение через интерфейс actionlib задатчику AnimationJointTrajectory,
устанавливать текущую желаемую позу через топик joint_state_set и включать/отключать приводы.
Редактор добавлять в свой список контрольных точек новые из топика joint_state_ref.
Оператор может менять позу робота, используя интерфейс joints_state_publisher или используя графический интерфейс MoveIt! motion_control, подключаемый как плагин rviz.
Также можно через интерфейс joint_trajectory_editor путем активации задатчика torque_main_switch отключить приводы и менять позу вручную.
При этом реальная поза робота через torque_main_switch и agregator_ref передается в топик joint_state_ref.
Траектории хранятся в сериализованном состоянии в виде бинарных параметров ROS в пространстве имен /sweetie_bot/joint_trajectory.
При этом используется cериализация ROS.
Сохранение траекторий в файлы или загрузка их из файлов осуществляется штанами средствами rosparam. Желательно предусмотреть
возможность хранение траекторий в отдельных файлах в человекочитаемом виде.
Для этого можно использовать средства сериализации OROCOS (boost::serialization)
или ROS rospy_message_converter.
Типы данных
Подробнее в типы данных
Траектория в угловой системе координат:
control_msg::FollowJointTrajectoryGoal --- траектория в угловой СК с информацией о требованиях к ее исполнению.
control_msg::FollowJointTrajectory --- действие actionlib по исполнению траектории в угловой СК.
Задатчик AnimationJointTrajectory (исполнение действия FollowJointTrajectory)
Задатчик исполняет траекторию переданную в FollowJointTrajectoryGoal.
Варианты использования:
интеграции с MoveIt!,
исполнения сохраненных траекторий, передаваемых клиентской частью.
Входные порты
Синхронизация
sync(TimerEvent, EventPort) --- синхронизация таймера.
Текущее состояние робота
joints_sorted(JointState) --- состояние робота в угловой СК (желаемая или реальная по датчикам), сообщение отсортировано по кинематическим цепочкам.
Выходные порты
Поза робота (gait)
joints_ref(JointState) --- задающее воздействие в угловой системе координат.
Параметры
Возможны параметры настройки системы сопряжения траекторий.
Операции
- Предоставляет: действие
control_msg::FollowJointTrajectory. - Требует: сервис
RobotModel. - Требует загрузки в компонент (опционально): сервис
TransientJointStateInterfaceсглаженная и сопряжения траекторий.
Семантика исполнения
Получение нового задания:
проверка условий запуска (поза робота в пределах лимитов из задания),
прерывание старого задания,
построение сплайна по полученной траектории,
используя сервис robot_model определяет набор нужных ресурсов, запрашивает ресурсы.
Исполнение: проверяет, что не нарушены лимиты отклонения от траектории, используя кешированный сплайн и прошедшее время, определяет желаемую позицию,
Детали реализации
Т.к. компоненты задатчиков будут иметь общий код, то рекомендуется вынести его в родительский класс AnimationJointTrajectoryBase,
общий для всех задатчиков.
После получения задания траекторию и ее лимиты лучше кэшировать в удобную структуру. В частности, может понадобится переупорядочивание звеньев, в соответствии с принятым порядком.
Для интерполяции предлагается использовать alglib (tinyspline
не подходит, т.к. не обеспечивает неравномерные временные интервалы. Проверить!).
Лучше использовать алгоритмы сопряжения траекторий второго порядка. Реализация должна подразумевать возможность легкой замены алгоритма сопряжения, выбора его через параметры, передача параметров ему.
Ошибки и исключения
Предупреждения: 2. Выход за пределы лимитов по позиции: цель отклоняется.
Ошибки: 1. Несуществующий сустав.
Задатчик AnimationStoredJointTrajectory (исполнение сохраненных траекторий FollowJointTrajectoryGoal)
Считывает набор траекторий из параметров ROS. При получении сообщения с текстовым идентификатором нужной траектории исполняет ее. Предназначен для проигрывания именованных анимаций.
Единственное превосходство над AnimationJointTrajectory --- более быстрое переключение траекторий, т.к. их можно заранее кэшировать.
На настоящий момент задатчик видится излишним и реализовываться не будет.
Входные порты
sync(TimerEvent, EventPort) --- синхронизация таймера.joints_sorted(JointState) --- состояние робота в угловой СК (желаемая или реальная по датчикам), сообщение отсортировано по кинематическим цепочкам.
Выходные порты
joints_ref(JointState) --- задающее воздействие в угловой системе координат.support_ref(SupportState) --- ожидаемое распределение веса, всегда ноль для управляемой конечности.
Параметры
string trajectoris_path--- пространство имен ROS, используемое для хранения траекторий.
Возможны параметры настройки системы сопряжения траекторий.
Операции
- Предоставляет: действие
TextAction--- выбор траектории по имени. - Требует: сервис
robot_model. - Требует загрузки в компонент (опционально): сервис
TransientJointStateInterfaceсглаженная и сопряжения траекторий.
Семантика исполнения
Конфигурация: загрузка и кэширование всех траекторий из файлов с последующим выбором по имени.
Получение нового задания: то же, что в случае AnimationJointTrajectory, однако строить сплайн уже не надо: он есть в кэше.
Исполнение: совпадает с AnimationJointTrajectory.
Детали реализации
Использует тот же базовый класс и структуры хранения траектории, что AnimationJointTrajectory
Ошибки и исключения
Предупреждения: 2. Выход за пределы лимитов по позиции: цель отклоняется. 1. Файл не читается.
Ошибки: 1. Несуществующая траектория. 1. Несуществующий сустав.
Сохранение движения: нода ROS JointTrajectoryEditor
Предоставляет пользовательский интерфейс для создания траекторий по контрольным точкам.
Подписан на топики
joint_states(JointState) --- поза робота (желаемая или по датчикам, зависит от конфигурации).
Публикует топики
joint_states_set(JointState) --- команда изменения позы робота. Может быть обработана задатчикомFollowJointState.joint_states_marker_set(JointState) --- выбор строки в списке контрольных точек.support_state_override(SupportState) --- список опорных ног.
Сервисы ROS (операции)
- Требует:
set_torque_off(std_srv::SetBool) --- активация/декактивация задатчикаTorqueMainSwitch, отключающего приводы. - Требует:
get_servo_status(diagnostic_msgs::SelfDiag) --- запрос состояния приводов уTorqueMainSwitch(возможно, следует выбрать иной тип сообщения).
Действия
- Требует:
joint_trajectory(FollowJointTrajectoryAction) --- передать траекторию на исполнение.
Параметры
trajectory_storage(string) --- имя пространства имен параметров, используемого для сохранения и загрузки траекторий. По умолчанию: "joint_trajectory". Траектории хранятся в виде сериализованных сообщенийFollowJointTrajectoryGoal.legs(string[]) --- имена кинематических цепочек, способных опорными служить ногами.
Семантика исполнения
Компонент предоставляет GUI в виде окна со списком или таблицей контрольных точек и рядом кнопок.
Компонент обрабатывает только подмножество сочленений, имеющих отношение к редактируемой траектории.
Это множество задается в диалоге (или вкладке) Trajectory setup....
Если не оговорено другого, то из сообщений должны извлекаться и обрабатываться только они.
Основные элементы окна:
-
Выбор редактируемой траектории. ComboBox выбора или задания имени траектории. Кнопки "Save" и "Load" для загрузки выгрузки трактории в параметры. Нотификация о несохраненны изменениях. Кнопка "Dump..." для открытия диалога выгрузки парметров в файл. Автовыгрузка резервной копии при закрытии. Как альтернатива --- пункты меню и диалог выбора траектории.
-
Диалог (вкладка) "Trajectory setup..." --- доступ к изменению базовых параметров траектории
FollowJointTrajectoryGoal. Текстовые поля дляname(имя файла),goal_tolerance. Наиболее гибкое представление дляjoints_names,path_tolerance,goal_tolerance--- таблица. Желательно предусмотреть возможность назначения лимита для всех звеньев сразу. В перспективе можно сделать "выключение" звеньев, когда они остаются в таблице, но траектория им не посылается, отображения текущей позы.Алтернативный упрощенный вариант --- через текстовые поля, ввод через пробел.
В списке не может быть звеньев, отсутсвующих в
joint_states. -
Список/таблица контрольных точек: удаление точки, редактирование времени, отображение списка значений углов, пометка начальной и конечной точки (вероятно, лишнее), флаг "выключения" строки (становится серой, не участвует в формировании траектории).
При выделении пункта посылается сообщение
joints_marker_set.Должны быть обеспечены средства контроля целостности: список отсортирован по времени, маркер начала раньше конца и т.п. В перспективе можно добавить отметки, какой точке соответсвует реальная и моделируемая в пределах
path_tolerance. -
"Reverse direction" --- меняет местами начальную точку и конечную (при наличии конпки "Execute real backward" не нужно).
-
"Speed scale" (слайдер), кнопка "Apply scale" --- первый устанавливает модификатор масштаба времени при исполнении (не меняет таблицу), вторая применяет этот модификатор к таблице.
-
"Add pose" --- добавляет в список точек позу из
joint_state. -
"Set robot pose" --- устанавливает позу робота через
joint_states_setв соответсвие с выбранной строкой списка. Вообще, правильнее использовать actionlib для этого действия. -
"Turn all servos on/off" --- отключает/включает приводы робота. Рядом должна быть индикация состояния приводов.
-
"Execute" --- передает траекторию на исполнение задатчику. Результат действия
actionlibотображается рядом с кнопкой. Траектория формируется по текущему содержимому списка от "начальной точки" к "конечной". Это позволяет удобно отлаживать кусок траектории. -
Флаг "backward" --- флаг исполнения траектории в обратном направлении. Удобно для возврата робота в исходную позу.
-
"Save trajectory...", "Load trajectory..." --- загрузка и сохранение траектории. Всегда сохраняется полное содержимое таблицы, от начала до конца, масшатб скорости исполнеения игнорируется. Т.к. используются редко, то логично перенести в "Tarjectory Setup..." или меню. Траектории хранятся в виде сериализованных сообщений
FollowJointTrajectoryGoalв пространстве имен, заданным параметромtrajectory_storage. -
"Add SRDF pose..." интерфейс выбора именованной позы из SRDF или хранилища статических поз робота. Поза добавляется в виде контрольной точки. (Элемент избыточен: полаги MoveIt! позволяет перевести робота в любубю SRDF позу).
-
Управление списком опорных ног. Флажок "Publish contact list" включает публикацию сообщения
SupportState. Рядом список ног с флажками-признаками, что нога опорная. Список берется из параметраlegs. Данный интерфейс используется для планирования сложных движений с перемещением платформы на виртуальном роботе. Он указывает компоненту одометрии, какие ноги считать опорными, что позволяет ему корректно вычисялять положение платформы.
Детали реализации
Для представления списка следует использовать отдельный класс.
Непосредственно FollowJointTrajectoryGoal формируется по экземпляру этого класса по соответствующим командам. Он же занимается разбором JointState
Следует сразу предусмотреть возможность хранения и отображения TextCommand и дальнейшей замены FollowJointTrajectoryGoal на FollowJointTrajectoryWithActionsGoal
Эскиз класса списка поз: WaypointsList
Поля:
1. Список управляемых суставов.
2. Значения о допусков.
3. Список (vector или list) структур контрольных точек, хранящих углы, время, маркеры и признак активности точки.
Методы:
1. Конструктор.
2. Назначение допусков.
3. Добавление точки (аргумент --- полный JointState из которого выбираются нужные, если отсутсвуют, то ошибка).
4. Удаление точки.
5. Операции с маркерами, отключение точек (нужно видеть весь список, чтобы контролировать целостность, напрмер, нельзя отключить контрольную точку, помеченную начальной).
6. Применение масштаба времени.
7. Создание FollowJointTrajectoryGoal c заданным масштабом (задавать только позиции).
Для каждого списка создаются интерфейсные классы, выполняющие операции над WaypointsList.
Для работы с действиями использовать SimpleActionClient.
Отдельную проблему представлет выбор стратегии взаимодействия вкладки "Setup" и списка звеньев.
Не ясно, что должно происходить с элементами списка в этом случае, т.к. они снабжаются дополнительной информацией.
Возможны варианты:
1. Setup доступна только при пустом списке. Гарантирует, что новые звенья без известных позиций не могут быть добавделены. Самая простая реализация.
2. При изменении списка звеньев в Setup звенья удаляются/добавляются в траекторию. Новые звенья добавлются в нулевой позиуией во все точки (или позиция запрашивается у пользователя в диалоге, одна на все точки).
Более сложная реализация, поведение может быть неожиданным для пользоваетля.
3. Точки траектории в списке хранят поную позу, поэтому нет проблемы с добавлением/удалением звеньев. В данном варианте возникают сложности с процедурой Load, т.к. файл с FollowJointTrajectoryGoal
не хранит лишную информацию.
Для первичной реализации предлагается 2.
Вероятно, удобнее всего писать на python. От интерфейса не требуется реальное время.